– – Project Completed – –
This page shows the complete build of our robot
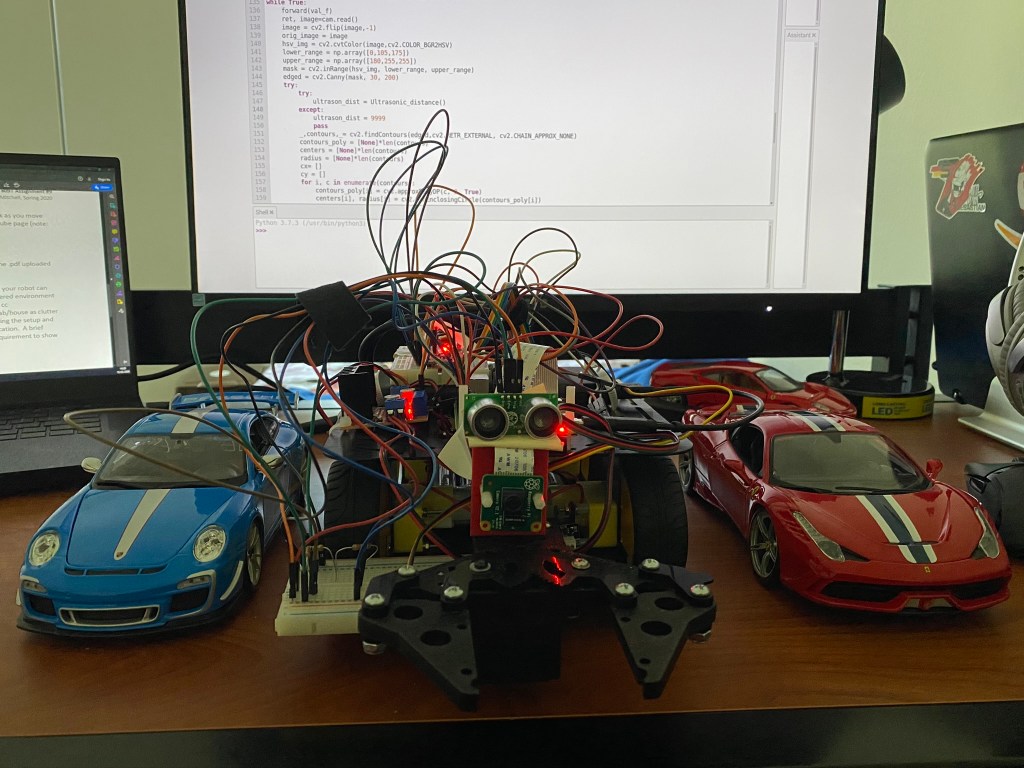
With companions
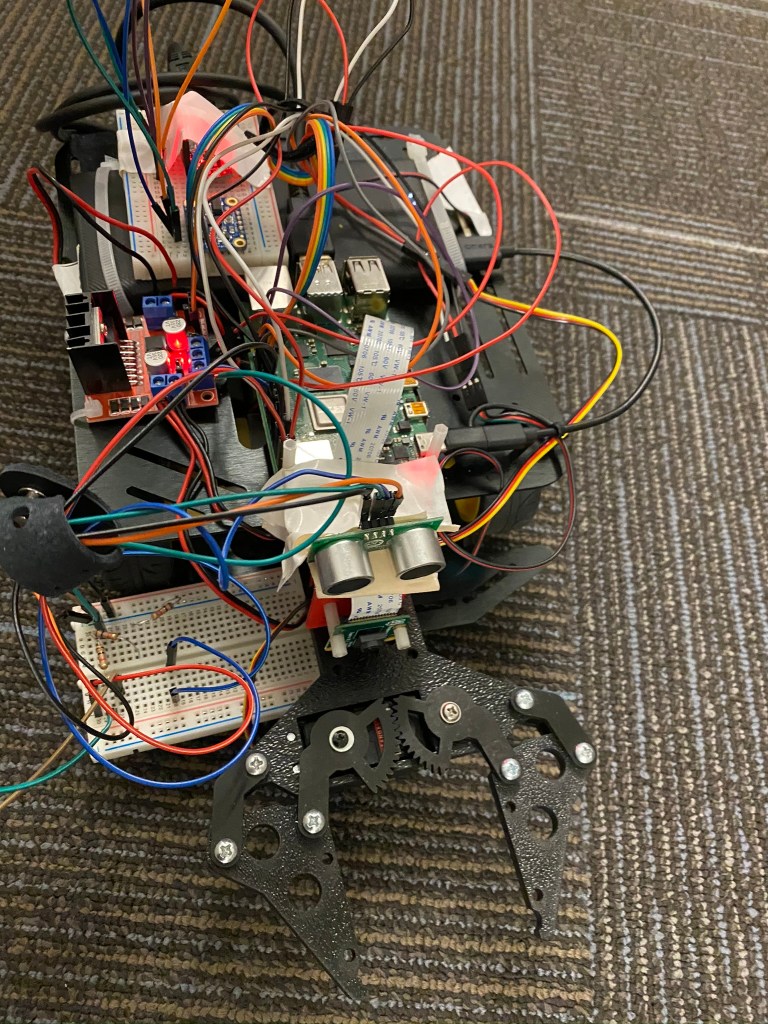
Object pick and drop based on color (Top View)
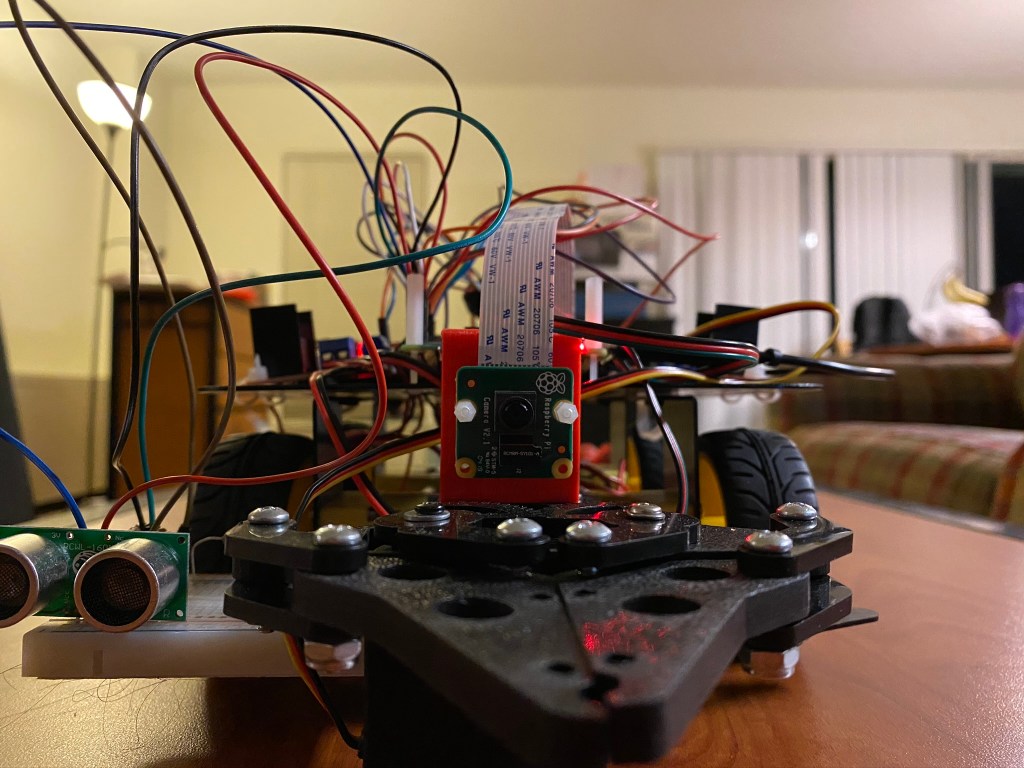
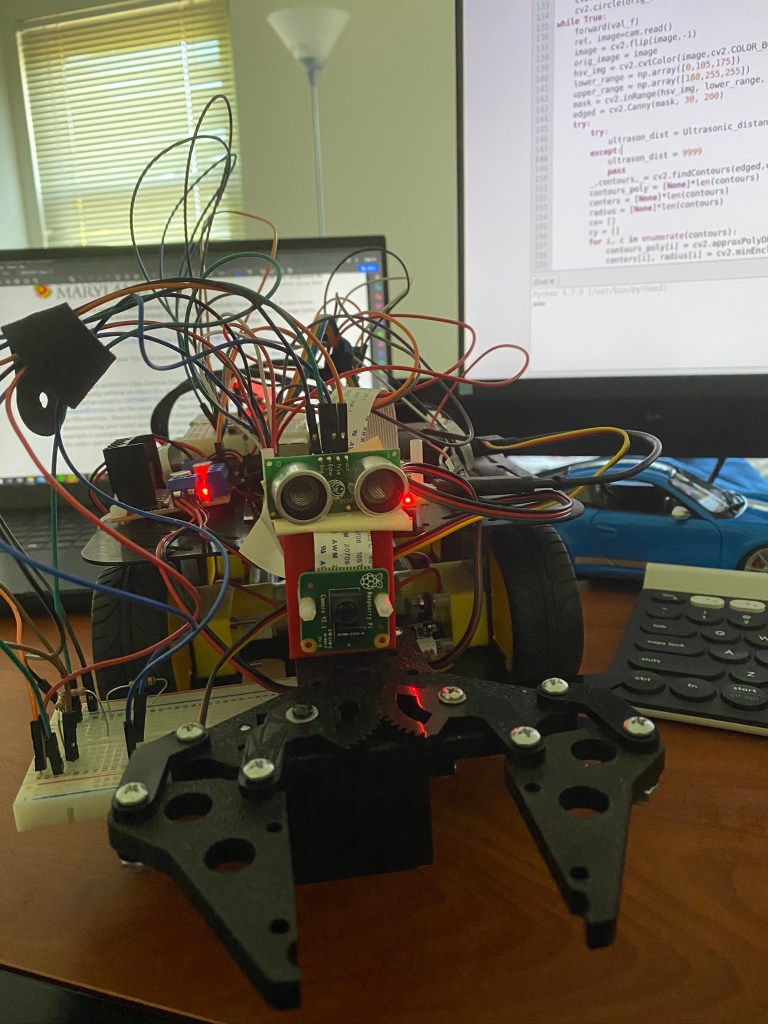
Object tracking based on color (Raspberry Pi Camera View)
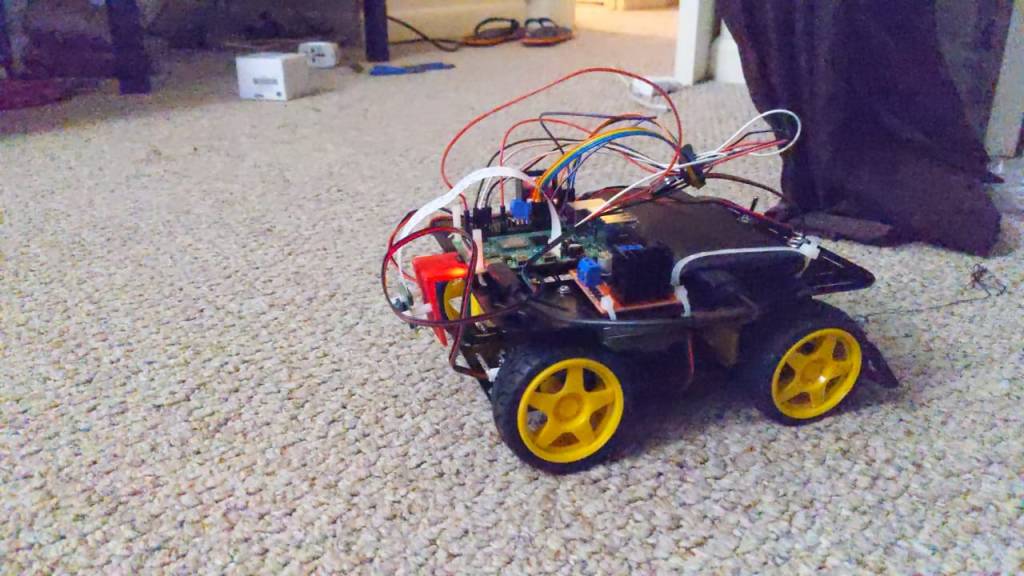
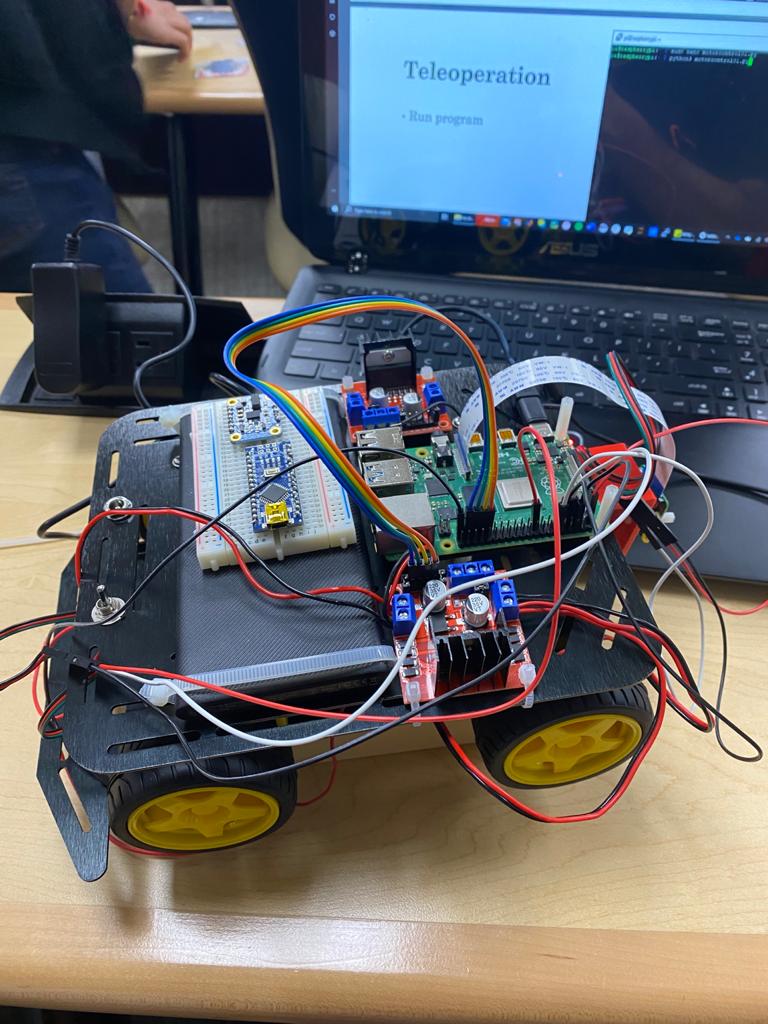
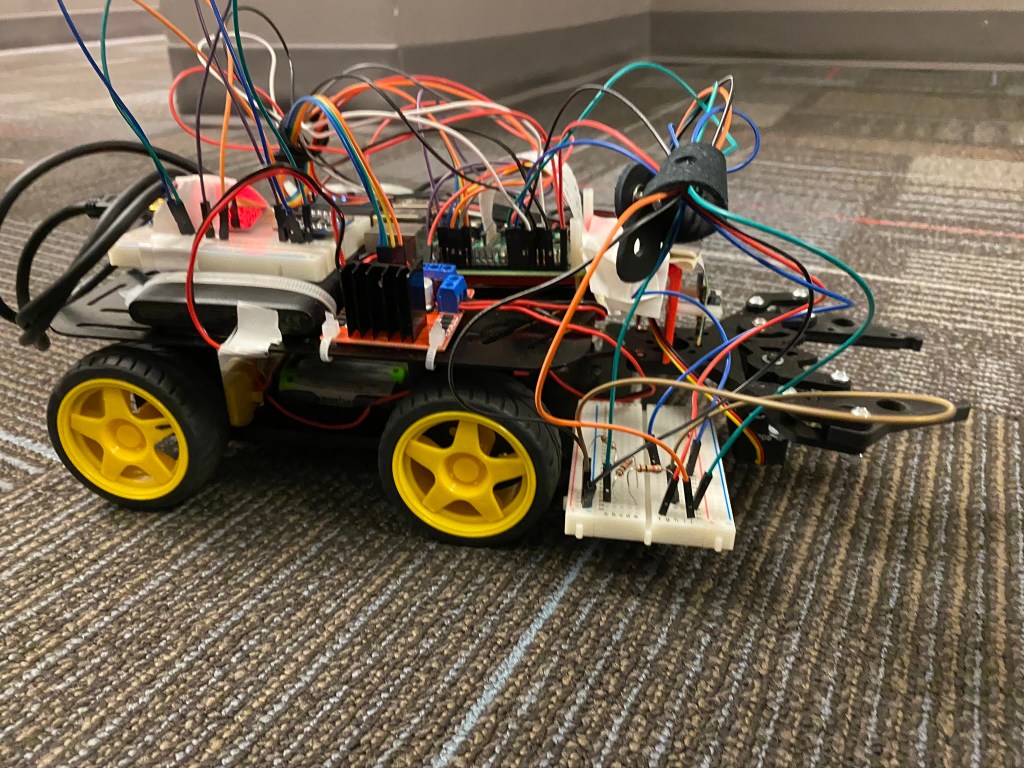
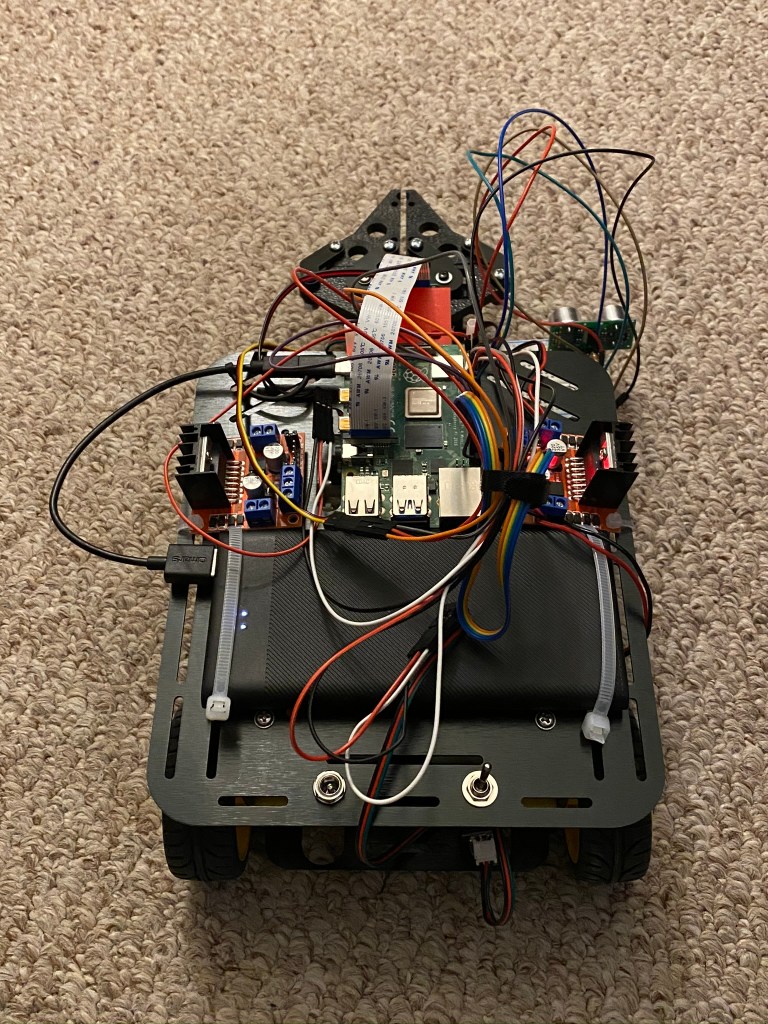
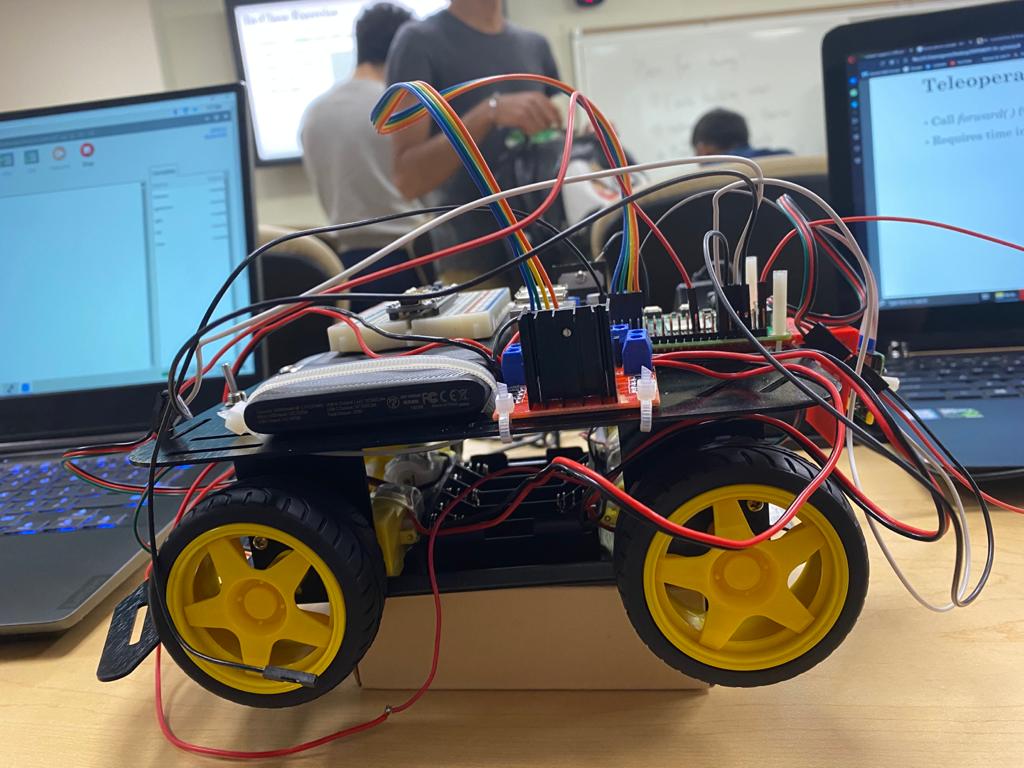
Full Robot Description
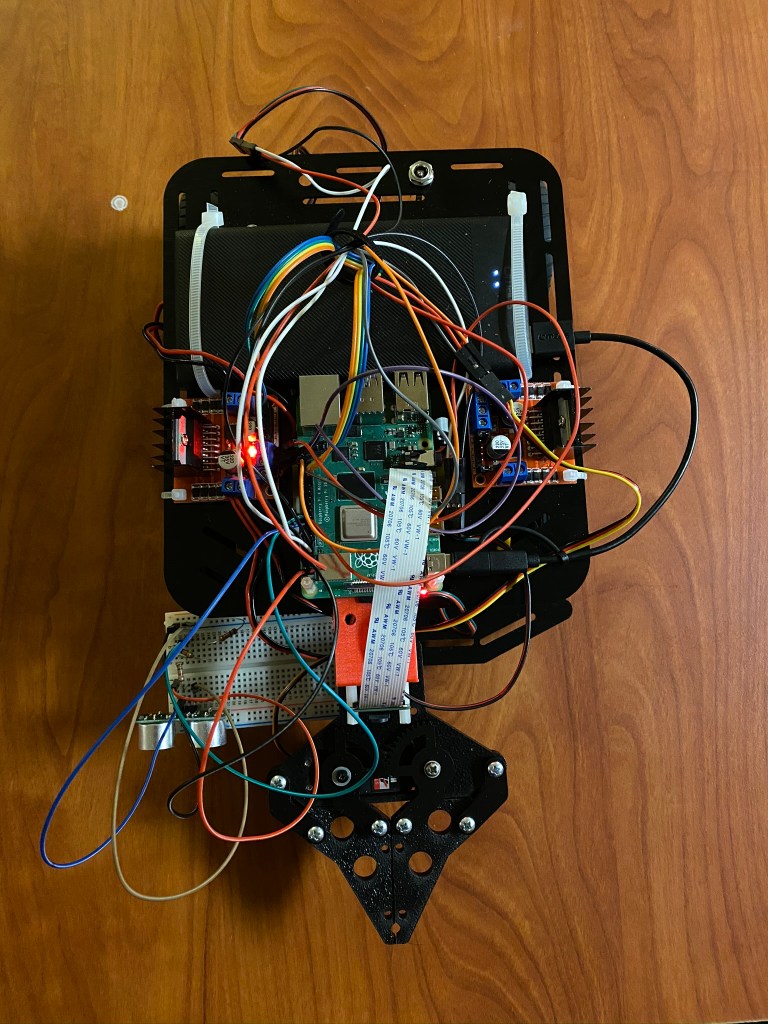
Latest build completed with full wiring done. IMU and Arduino Nano left to be assembled and connected to the robot
Straight, Reverse and Turns by the Robot

To goal and beyond
Robot Pick and Place
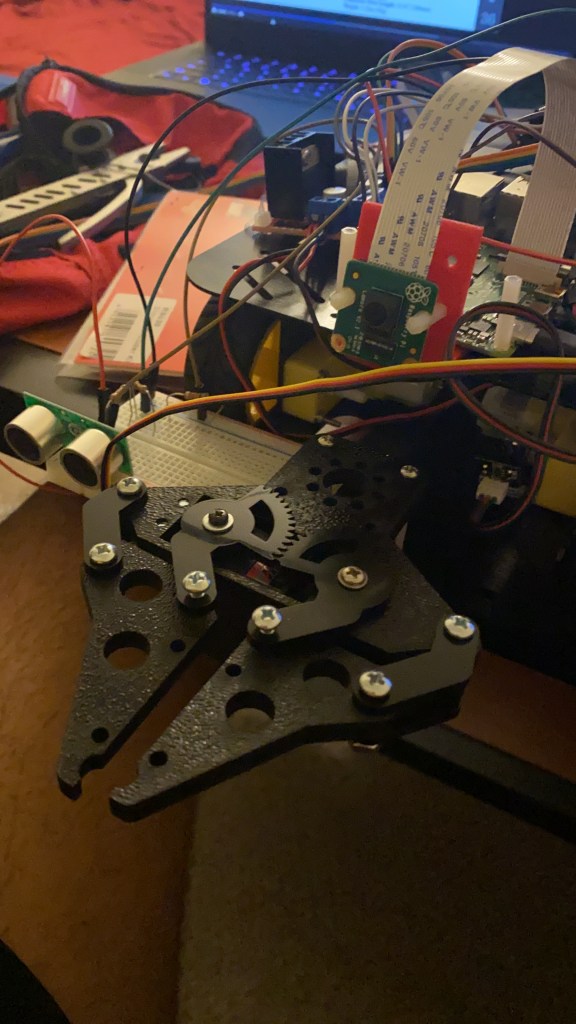
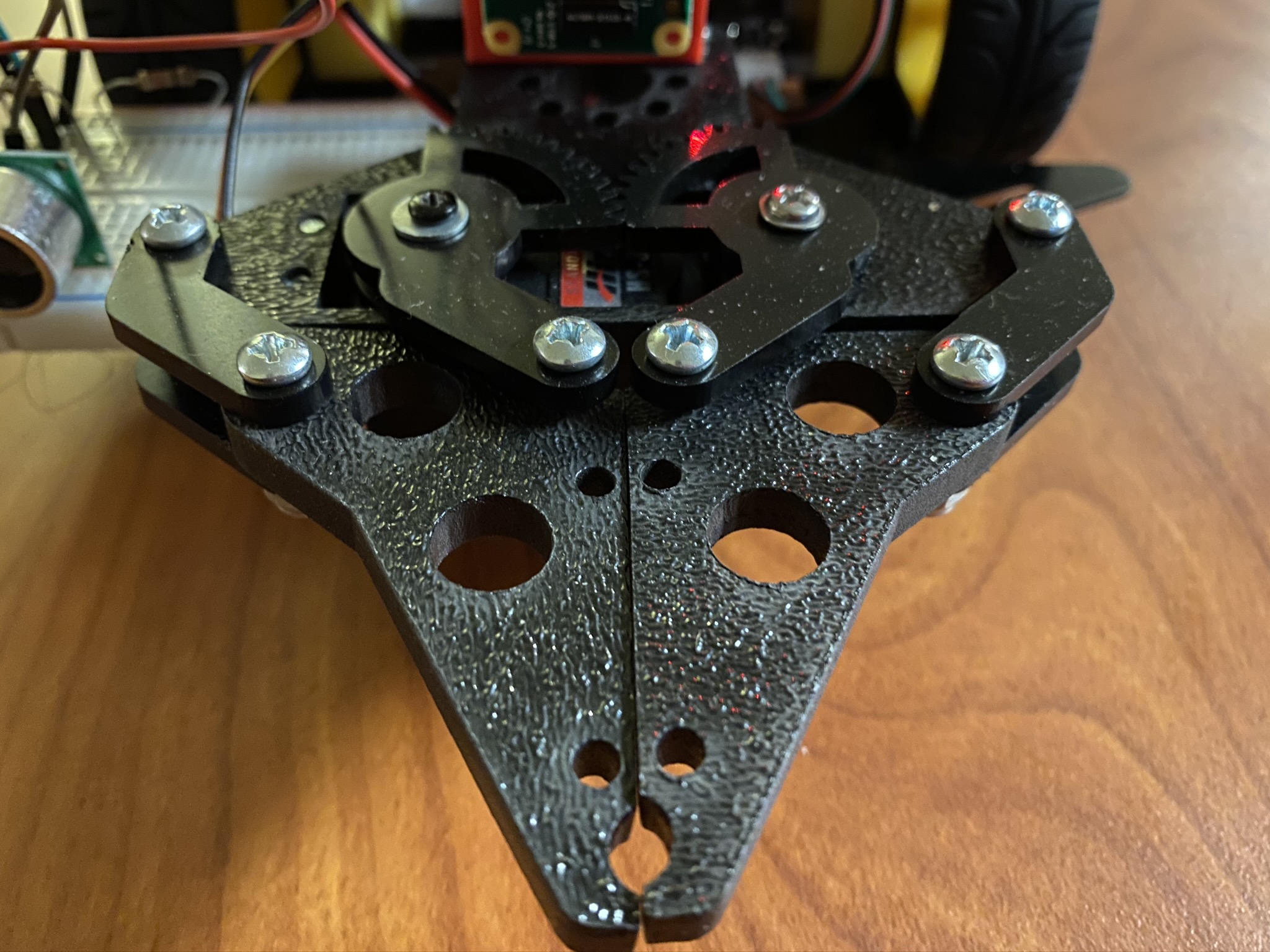
Gripper Assembly

Snapshots from the test run
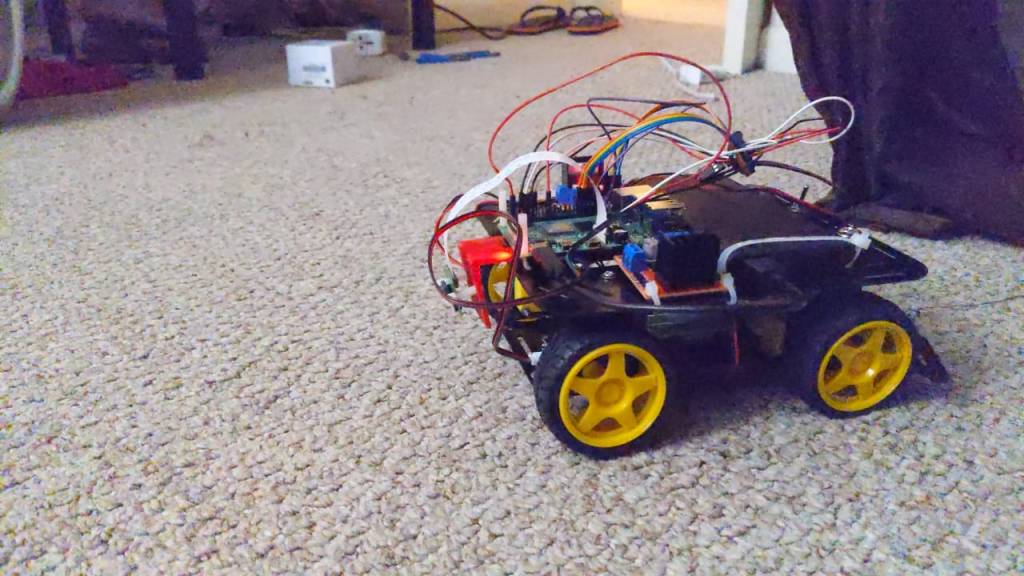
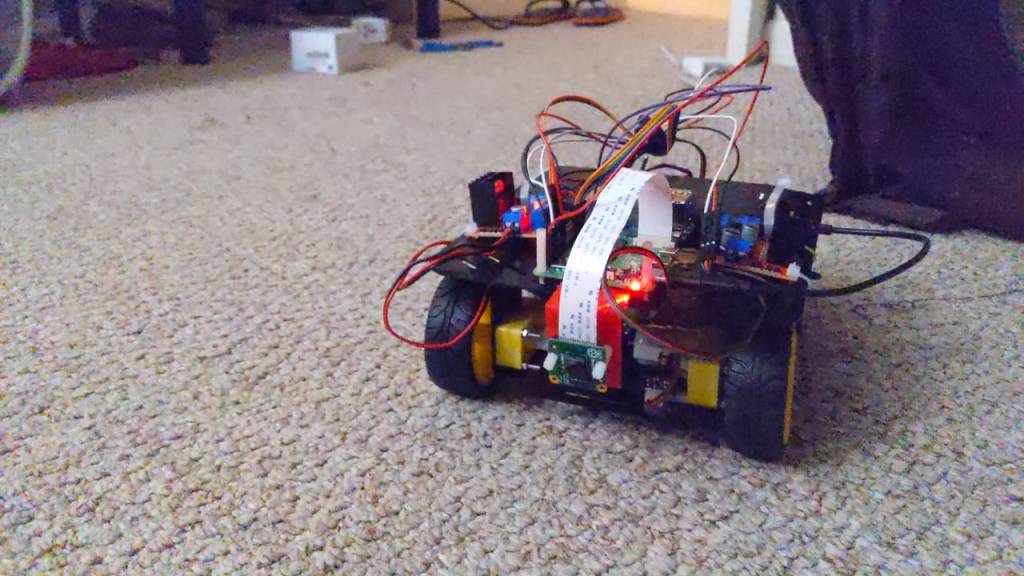
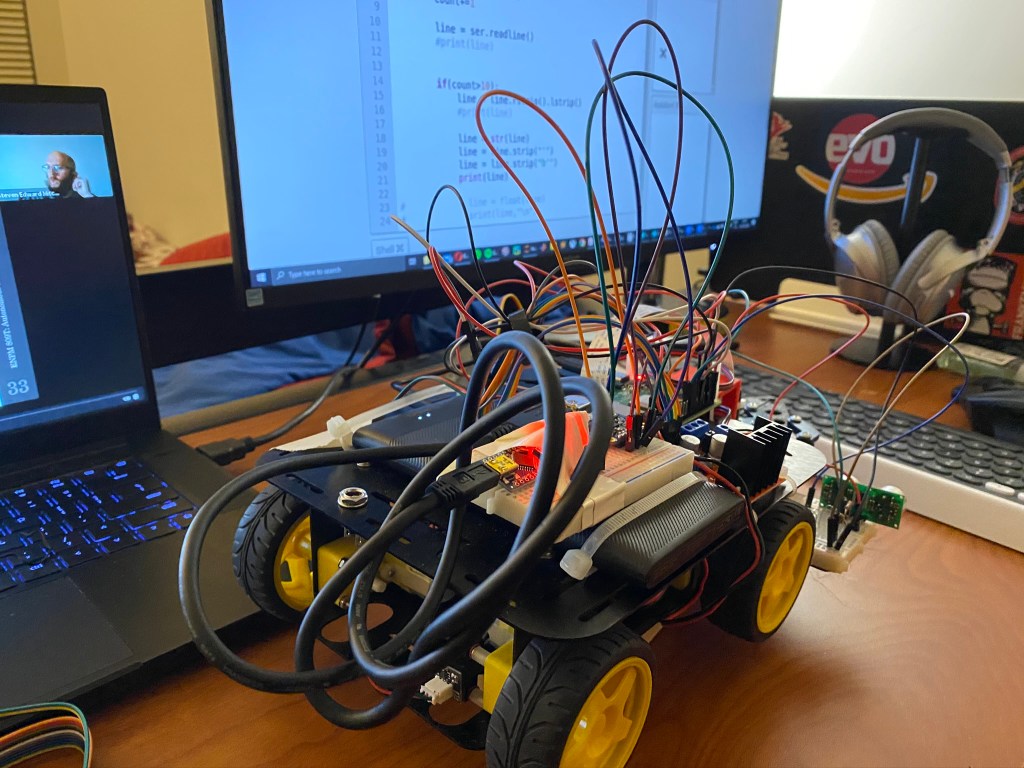
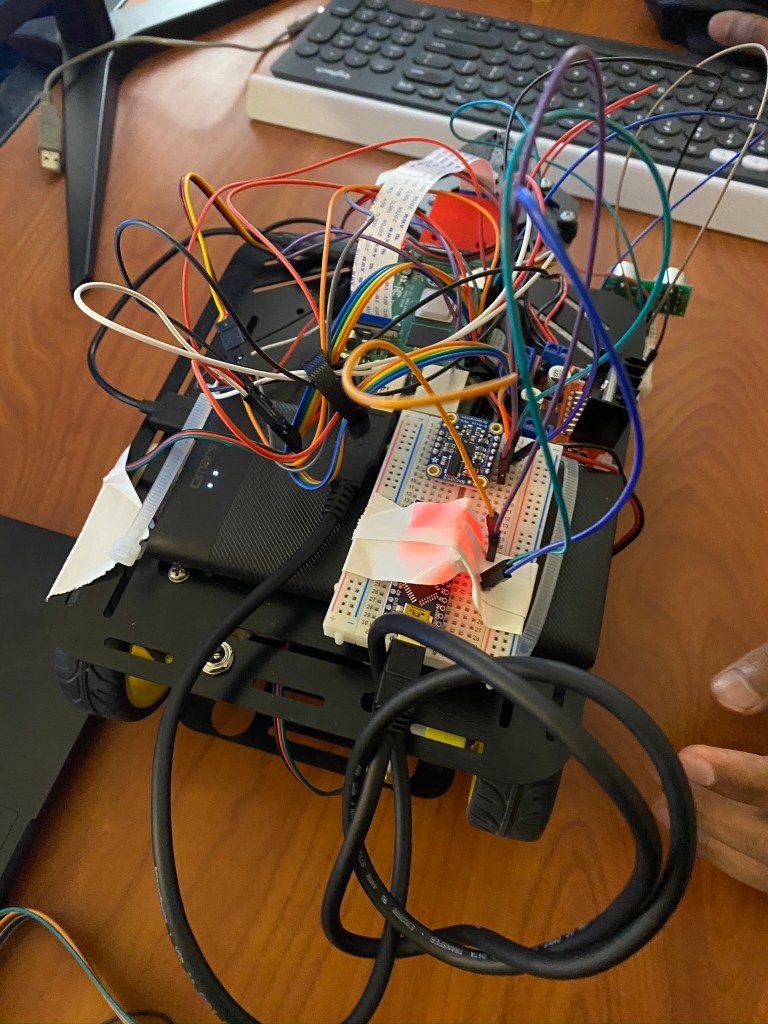
First running of the ground robot
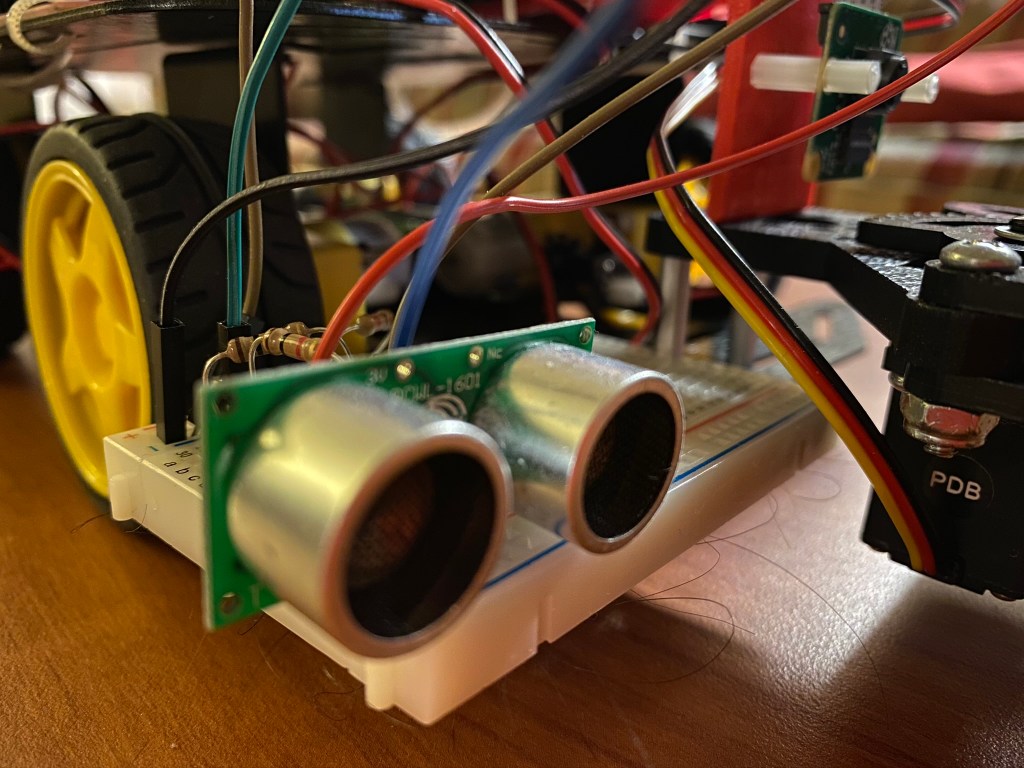
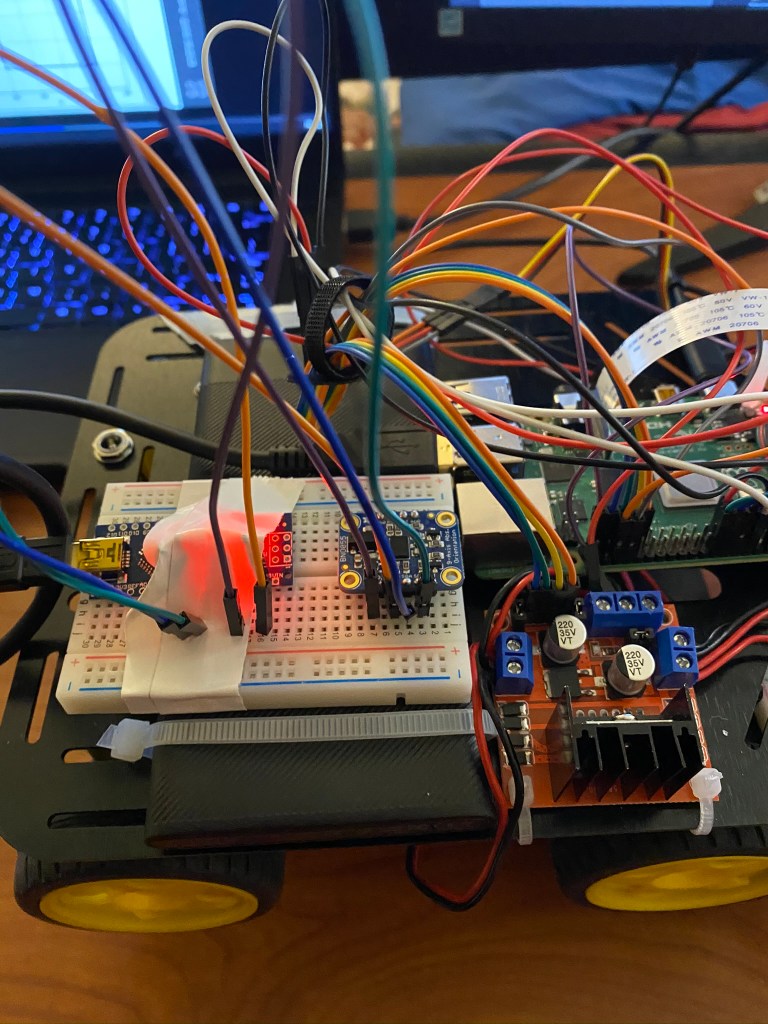
Initial Wiring done

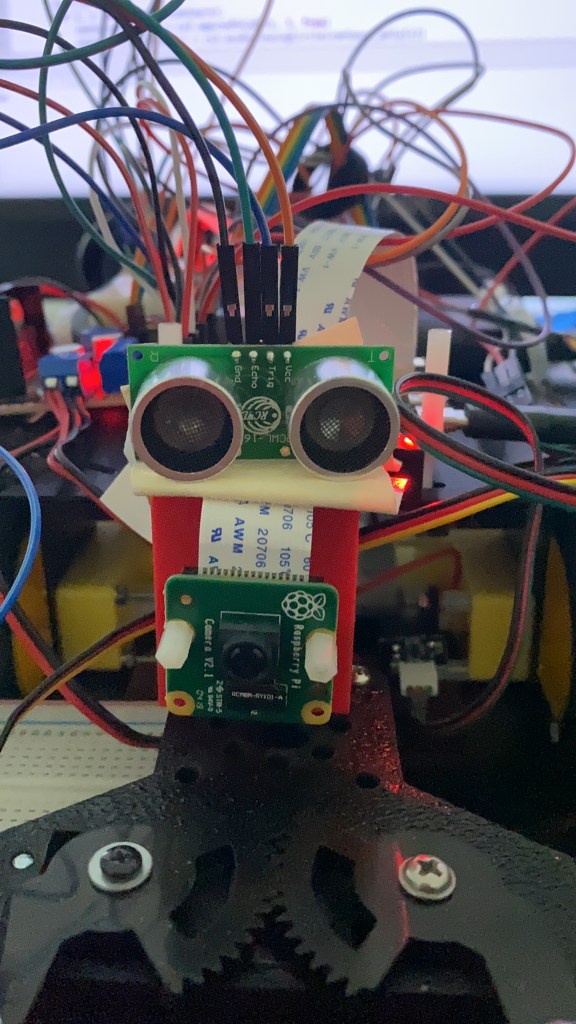
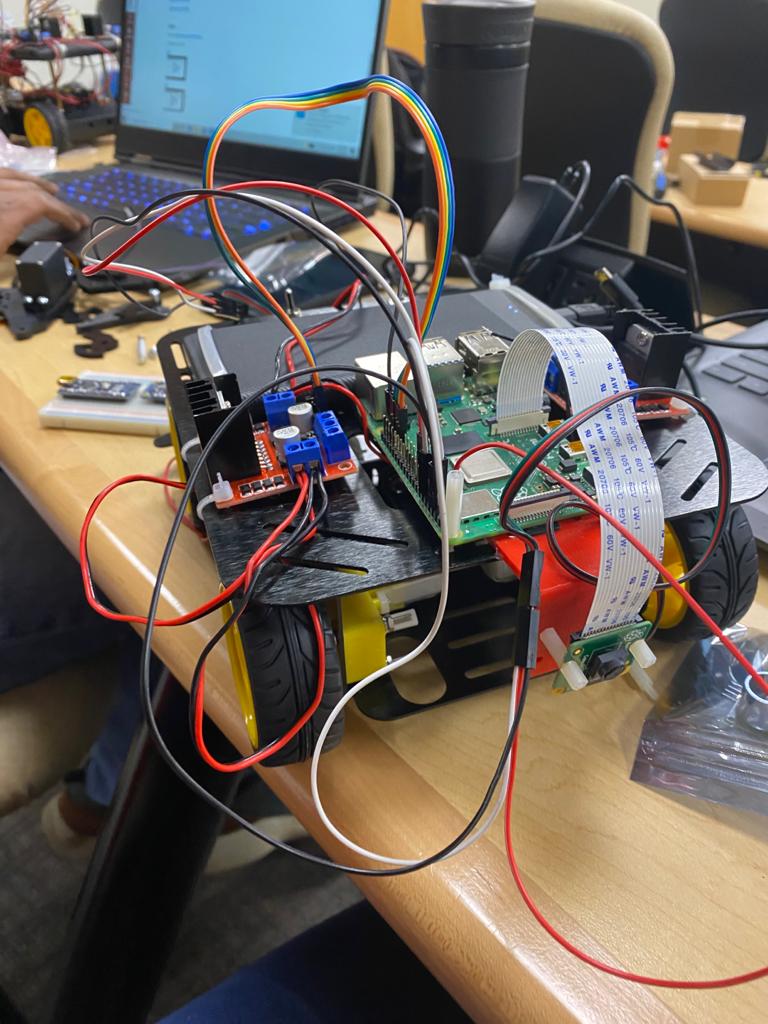
Raspberry Pi and Pi cam mounted
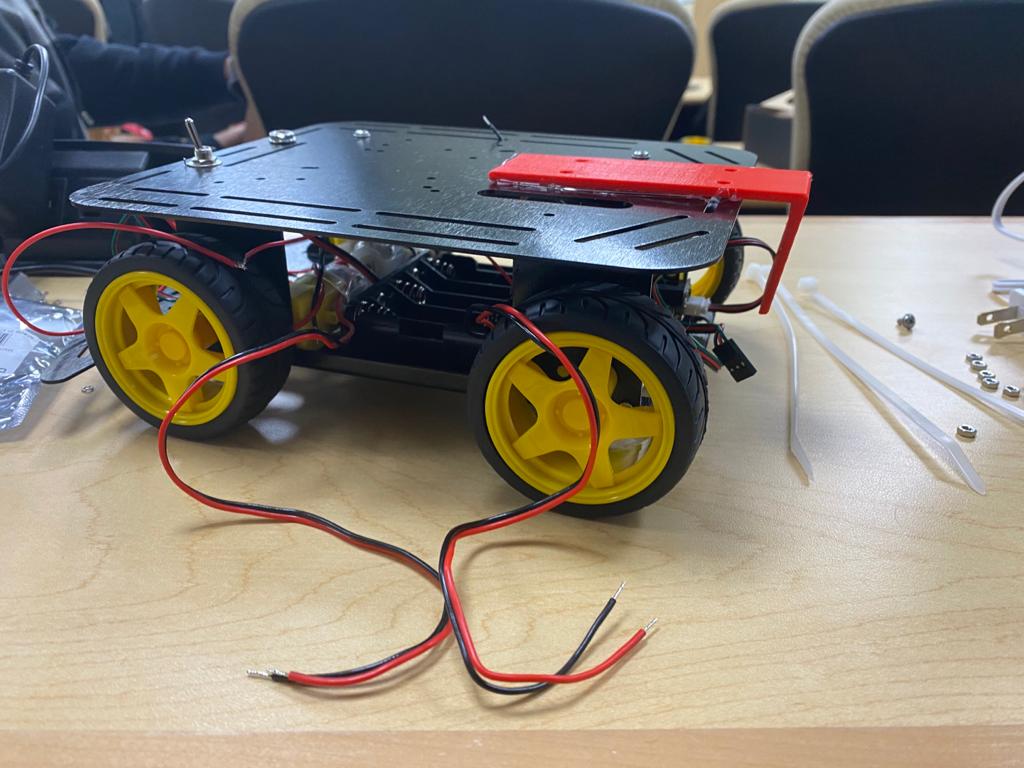
Wheels Mounted and basic mountings done
Colored object tracking explanation
( Encoder + IMU ) combined straight + Turn Test
Encoder straight + Turn Test
Inertial Measurement Unit (IMU) added to the build connected to Arduino Nano
Straight line test of the Robot’s motion
Gripper Working
L298n Motor Drivers Mounted
Time Lapse Build 1

Pi Cam – Front View
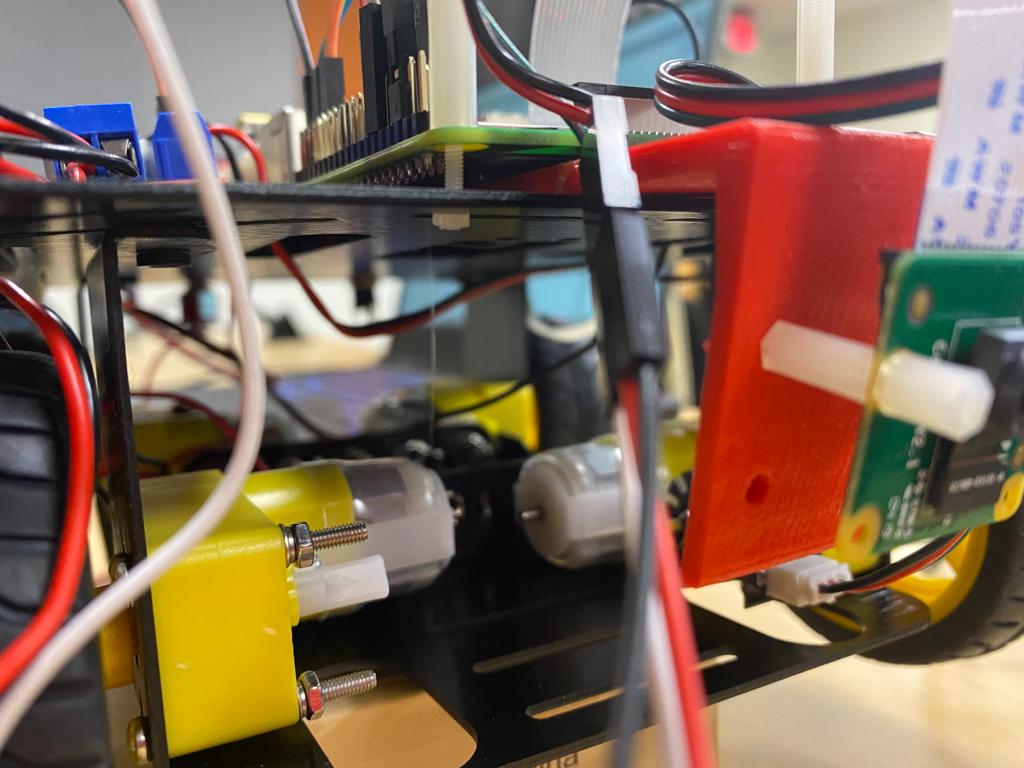
Motor packaging and 3D Printed camera mount glued to chassis
Robot taking shape

Raspberry Pi, connected and set up

